


Object Detection System
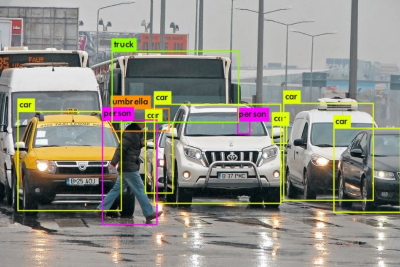
It's a real-time object detection algorithm, which is one of the most effective object detection algorithms that also encompasses many of the most innovative ideas coming out of the computer vision research community. Object detection is a critical capability of autonomous vehicle technology. It’s an area of computer vision that’s exploding and working so much better than just a few years ago.
It achieves high accuracy while also being able to run in real-time. The algorithm “only looks once” at the image in the sense that it requires only one forward propagation pass through the neural network to make predictions. After non-max suppression (which makes sure the object detection algorithm only detects each object once), it then outputs recognized objects together with the bounding boxes.
* Is extremely fast.
* Sees the entire image during training and test time so it implicitly encodes contextual information about classes as well as their appearance.
* Learns generalizable representations of objects so that when trained on natural images and tested on artwork, the algorithm outperforms other top detection methods.

The voiceprint-matching algorithm can be configured to work in a scenario where each user records a unique phrase (such as passphrase or an answer to a "secret question" that is known only by the person being enrolled). Later a person is recognized by his or her own specific phrase with a high degree of accuracy. The overall system security increases as both voice authenticity and passphrase are checked.

The phrase-independent speaker recognition uses different phrases for user enrollment and recognition. This method is more convenient, as it does not require each user to remember the passphrase. It may be combined with the text-dependent algorithm to perform faster text-independent search with further phrase verification using the more reliable text-dependent algorithm.
FEATURES AND CAPABILITIES
Detection method:
The detection method including the detection of over 9,000 object categories by jointly optimizing detection and classification.
Deep learning:
As with a lot of research work in deep learning, much of the effort is trial and error. In pursuit of the system, this effect was in force as the team tried a lot of different ideas, but many of them didn’t work out. A few of the things that stuck include: a new network for performing feature extraction consisting of 53 convolutional layers, a new detection metric, predicting an “objectness” score for each bounding box using logistic regression, and using binary cross-entropy loss for the class predictions during training. The end result is that runs significantly faster than other detection methods with comparable performance. In addition, no longer struggles with small objects.